Usted está aquí
Peruvian Journal of Neurosurgery
Articulated robotic arm for assistance in interventional radiology
ROLANDO ORTEGA, IVAN ORTEGA, DEISY ACOSTA, JORGE POMA, LUZ CASTAÑEDA
Abstract (Spanish) ||
Full Text ||
PDF (Spanish)
ABSTRACT
|
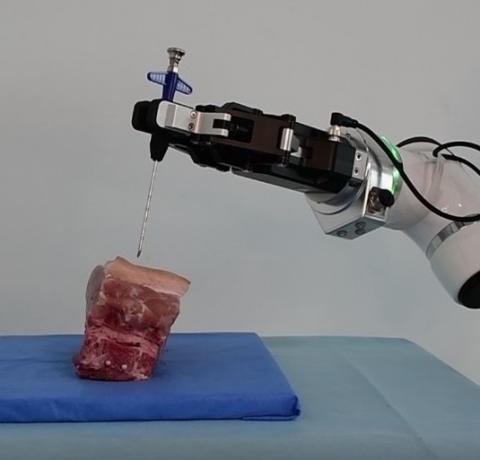
Objectives: Robotic technology has helped medicine to reduce exposure time and offer greater efficiency and precision in surgical interventions. The goal of using an articulated robotic arm for X-ray (Rx) guided minimally invasive surgery and interventional assistance is to reduce direct and secondary radiation on physicians. The use of a collaborative robotic arm (COBOT) that replaces the operating arm of the surgeon-interventionist physician to avoid exposure to X-rays is described.
Methods: The COBOT has a remote-controlled electronic gripper and includes a special needle holder made using 3D printing technology; This holds the interventional instrument, needles, and other surgical elements. The instrument-loaded forceps are oriented and progressed toward intracorporeal therapeutic target points used in interventional radiology and radiation therapy procedures, the COBOT boasts operational precision.
Results: Its operation was verified by simulating the interventional action in models in animal tissue, and experimental surgery laboratory.
Conclusions: It is concluded that the robot arm can perform assistance functions in radiological and stereotaxic neuroradiological interventionism with a good level of precision, reducing the doctor's exposure to X-rays.
Keywords: Robotics, X-Rays, Radiology, Interventional, Robotic Surgical Procedures (Source: MeSH NLM)
|